
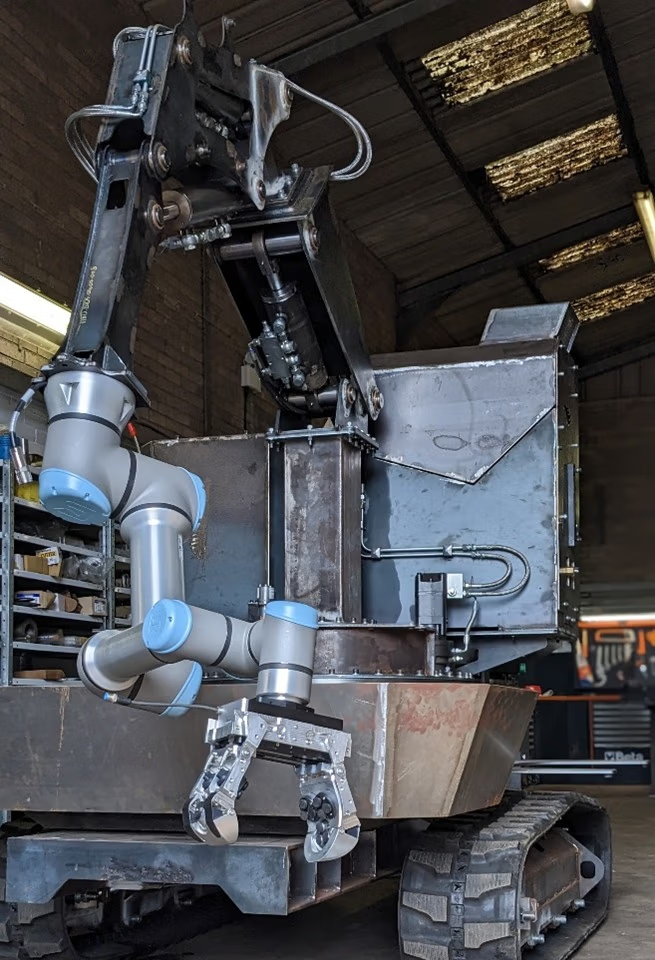
The Barrnon Innovative Decommissioning Platform (BID-P) is a range of fully CE marked hydraulic decommissioning robotic platforms ready to tackle the worlds decommissioning challenges, built ground up for nuclear decommissioning, they offer a modular system for the deployment and control of a wide range of tools.
Our systems are built for harsh, high-hazard environments where conventional demolition equipment is unsuitable. The platforms are ready to deploy, but flexible enough to be modified for customer-specific tooling, sensors, and site constraints.
Our systems are built for harsh, high-hazard environments where conventional demolition equipment is unsuitable. The platforms are ready to deploy, but flexible enough to be modified for customer-specific tooling, sensors, and site constraints.
For confined-space access, small cells, restricted routes and lightweight tooling.
Suitable for:
For higher-force demolition, heavy cutting and larger tooling packages.
Suitable for:

For confined-space access, small cells, restricted routes and lightweight tooling.
Suitable for:
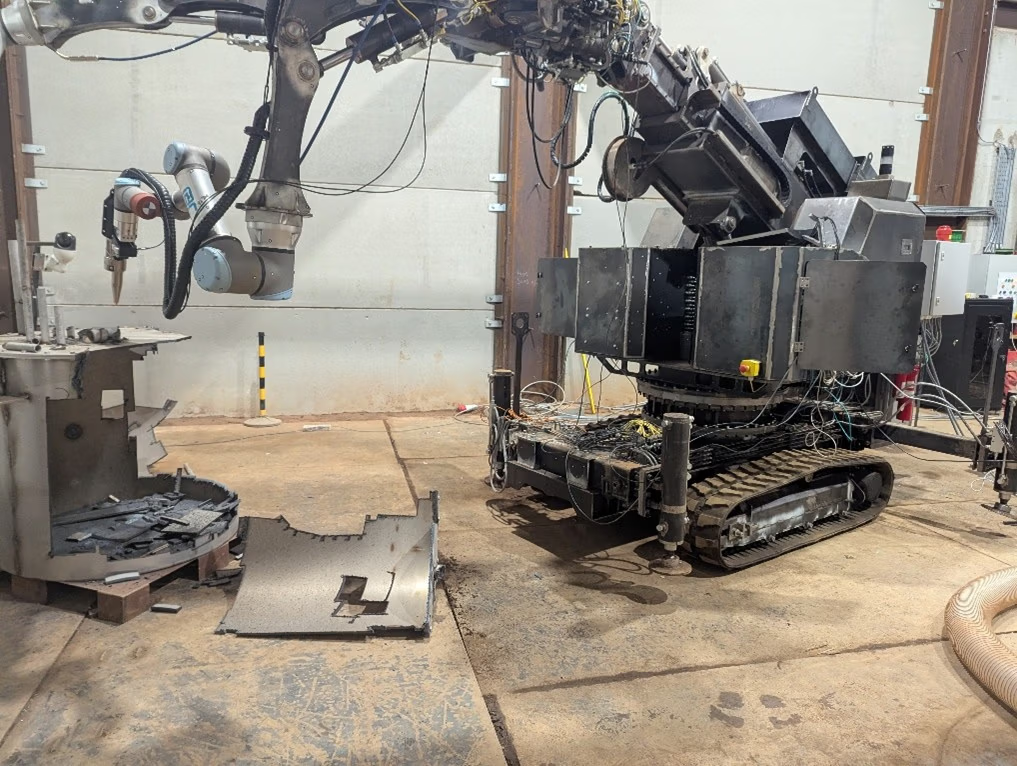
All the systems use the same modular approach to their build and can even be deployed in a modular format for fast assembly in-cell, this approach has been proven in Dounreay where a large BID-P platform was assembled from its modules in cell in full PPE, allowing access to an area that would have been impossible with a non-modular robot. This approach also allows new tooling to be added during campaigns as well as de-risking maintenance and end of life tasks.
BIDS™ / IIND demonstrated Barrnon’s capability in robotic deployment, digital planning, scanning and remote operation for complex Sellafield decommissioning tasks.
The Scabbler was developed for NRS Dounreay to remove contaminated concrete from pond walls, combining remote deployment, robust tooling and dust suppression.
The WHV and other Barrnon systems further demonstrate our ability to design, manufacture and deploy nuclear-grade robotic equipment for difficult-access environments.
This means new systems are not developed from scratch. Barrnon can combine proven platforms, control systems, tooling interfaces and digital workflows into customer-specific configurations.
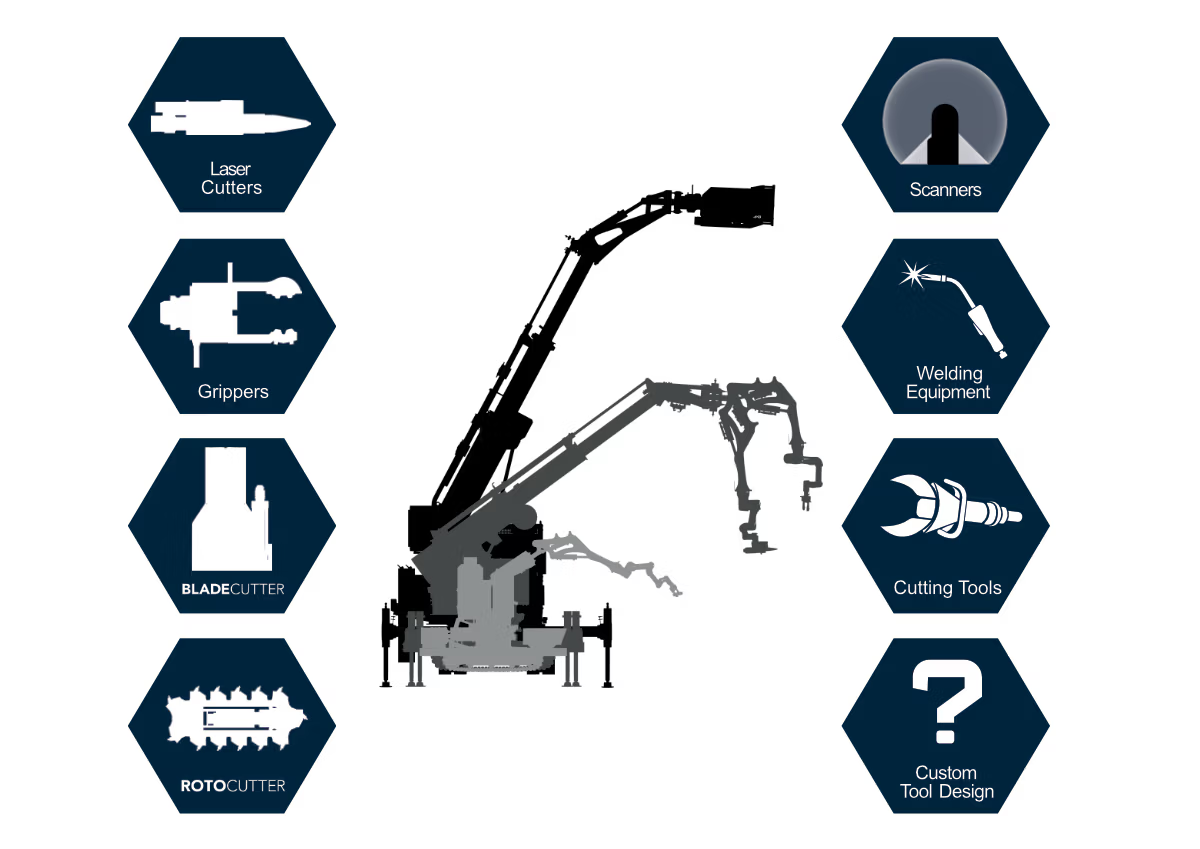
Barrnon platforms can be fitted with a range of existing tools and end-effectors, including:
Where a standard tool is not available, Barrnon can modify the platform or develop a new end-effector to suit the customer’s task.
The modular mechanical, electrical and software interface allows new tools to be integrated quickly, without redesigning the entire robot. This gives customers a faster, lower-risk route to deploying remote technology in nuclear environments.
Barrnon demolition robots are designed for nuclear decommissioning from the outset: robust, maintainable, remotely operated and ready to be adapted to the job.